
Goal of the Project
The objective of the BIOBLU project is to establish an advanced and autonomous system for identifying, mapping with geo-referencing capabilities, and collecting beach trashes. To achieve this, cutting-edge video cameras/drones (also known as UAVs – Unmanned Aerial Vehicles) is utilized in a designated “ground station”. The data gathered will be processed by an artificial intelligence system, which will subsequently transmit the information to a robotic system consisting of UGVs (Unmanned Ground Vehicles). These UGVs will perform the automatic waste collection and deposit it into a compaction chamber that effectively reduces its volume.
The knowledge, practical skills and competencies I gained during my internship at ROSYS Group:
Expanded professional skills in key areas such as programming, statistical analysis, and research methodologies, enhancing the capacity for problem-solving.
Developed proficiency in the Python programming language, specifically within the Robot Operating System (ROS) framework, thereby strengthening the capability to design and implement complex robotic control strategies.
Attained a deeper understanding and hands-on experience of artificial intelligence applications in robotics.
Developed competency in utilizing simulation environments, specifically Gazebo, for testing and refining robotic algorithms, facilitating a more efficient and effective development process.
Gained first-hand experience with robotic manipulators, specifically in executing pick-and-place tasks, leading to a greater understanding of real-world robotics applications and control mechanisms.
Videos

My contributions to the BIOBLU project:
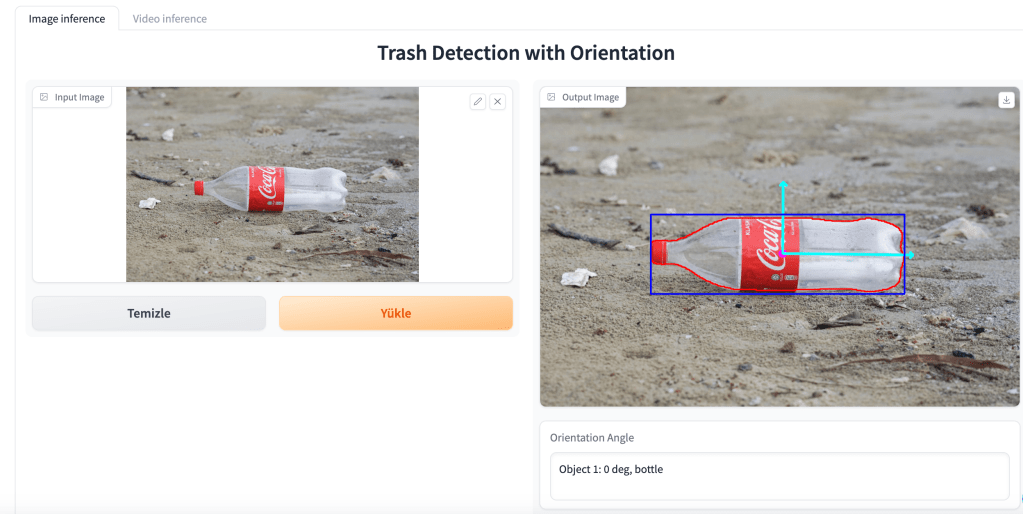
A robotics arm (UR10) is mounted on a mobile platform. We have implemented a multi-class classification system, utilizing the camera on the manipulator to distinguish between different types of trash, including plastic, metal, paper, and glass. Additionally, we have integrated the ability to detect the rotation of the object with respect to the end effector.
Two different methods were compared to obtain the orientation of trash. The first method is YOLOv5 OBB, which provides an oriented bounding box after training a custom dataset. The second method involves training YOLOv8 with segmentation. To obtain the orientation of the segmented object, Principal Component Analysis (PCA) is applied to the image to receive angle information.



